ENGR 122 · January – May 2025
Autonomous Racing Boat
Project Overview
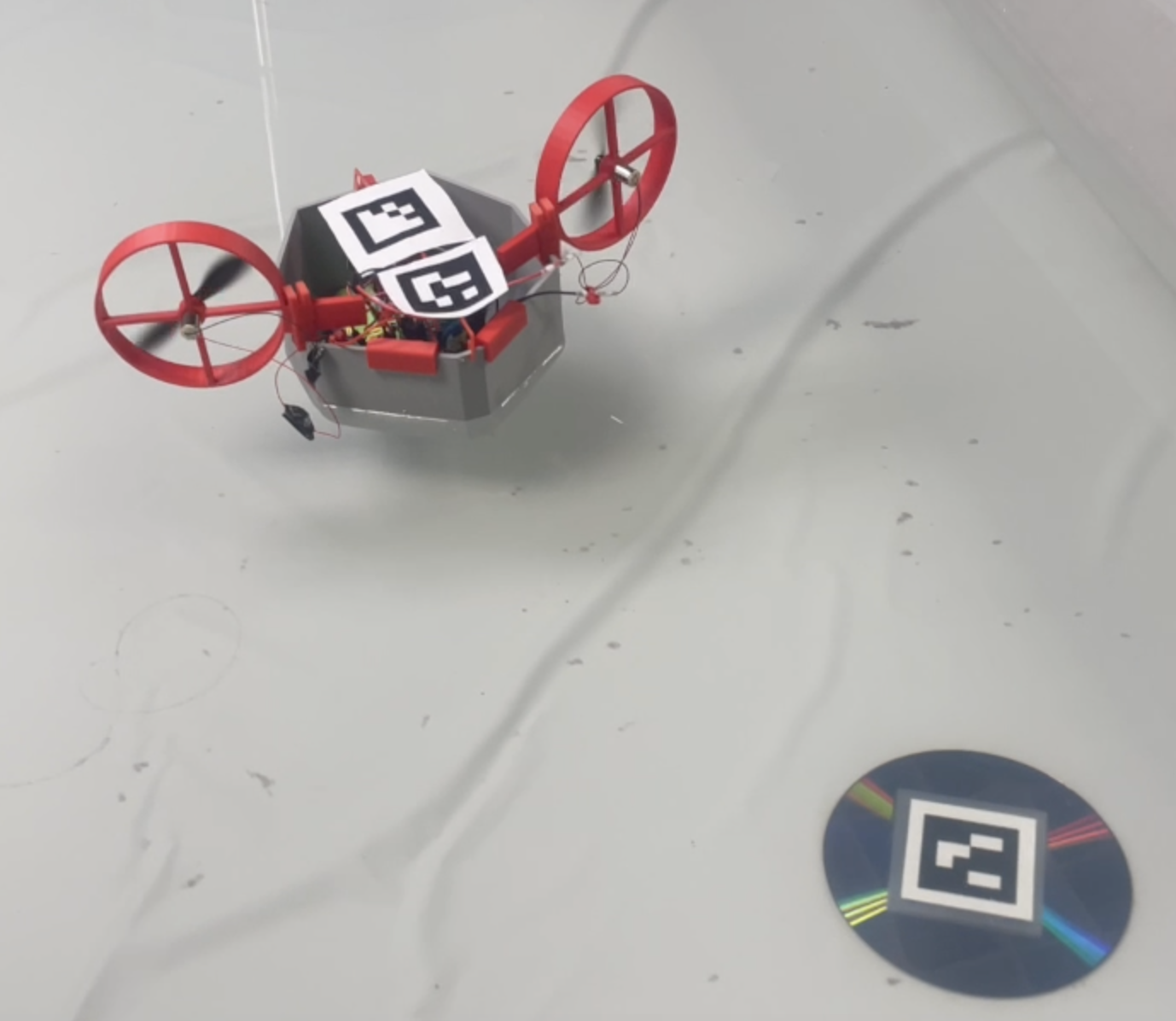
The Autonomous Racing Boat was developed as part of the ENGR 122 design course at Stevens Institute of Technology. The objective was to design and fabricate a 3D-printed, fully autonomous racing boat capable of completing three laps around a smart pool in under five minutes. The project combined mechanical design, embedded systems, and autonomous programming to produce a functional proof-of-concept vehicle.
Client & Challenge
The client, Stevens ENGR 122 Design Lab, required teams to use a standardized electronics kit to build an autonomous watercraft that could navigate independently using onboard sensors and ArUco marker tracking. The challenge was to achieve stable buoyancy, water-resistant electronics integration, and precise navigation within tight design and time constraints.
Design Process
The development process followed an iterative design and testing approach. Multiple hull geometries were evaluated using SolidWorks simulations to assess stability, center of mass, and buoyancy. Prototyping involved both scaled-down and full-size prints to validate flotation and electronic fit.
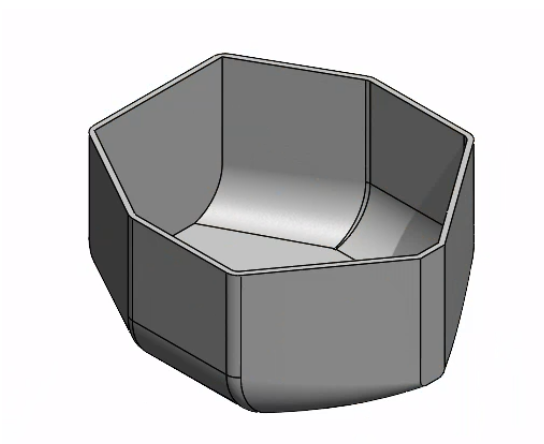
SolidWorks rendering of the Tortuga hull design.
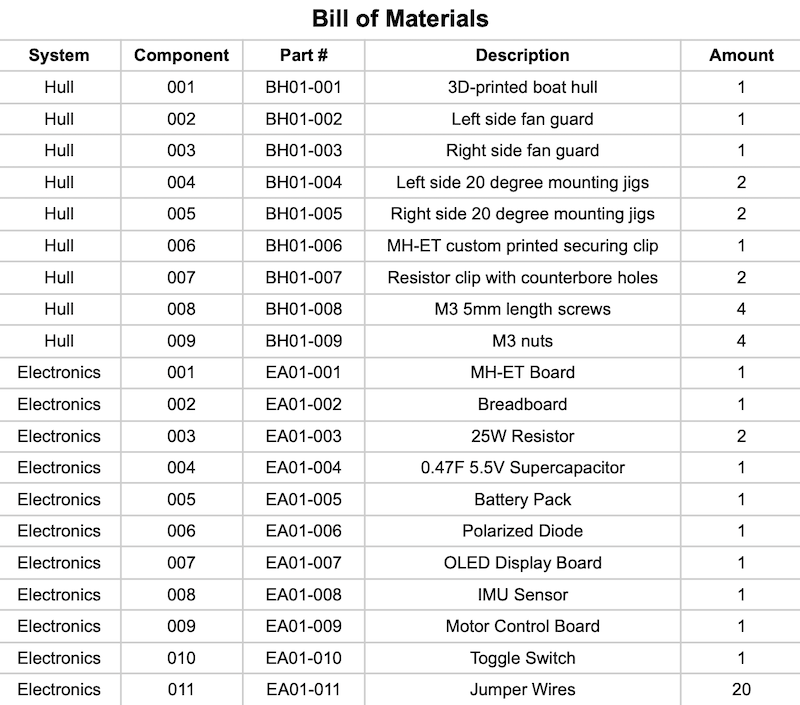
Bill of materials for the final boat design.
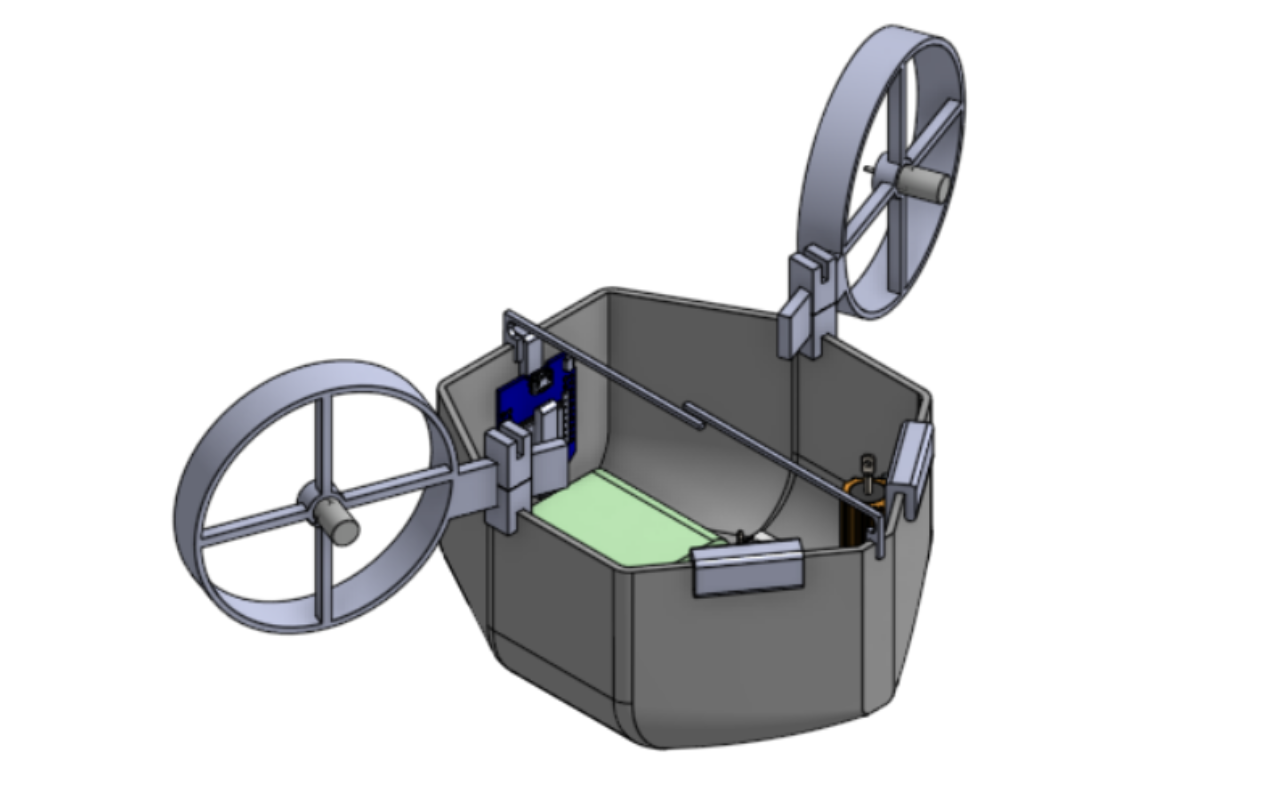
SolidWorks rendering of the complete boat assembly.
- Hull Design: Wide, turtle-shell-like base to improve stability and displacement.
- Fan Propulsion: Dual-motor configuration using angled fans for turning control.
- Component Mounts: Modular 3D-printed clips for easy installation and maintenance.
- Electronics Integration: MH-ET board with IMU, OLED display, and motor controller on a breadboard for modular wiring.
System Architecture
The autonomous system used an ESP32-based MH-ET controller communicating with Stevens’ MQTT server to process ArUco marker data. The control algorithm used positional feedback to navigate between set waypoints, completing a loop around the pool.
- Inputs: ArUco marker positions, IMU orientation, user-defined waypoints.
- Processing: Position calculation, PID-based direction control, MQTT communication.
- Outputs: Dual fan actuation for navigation, OLED display feedback.
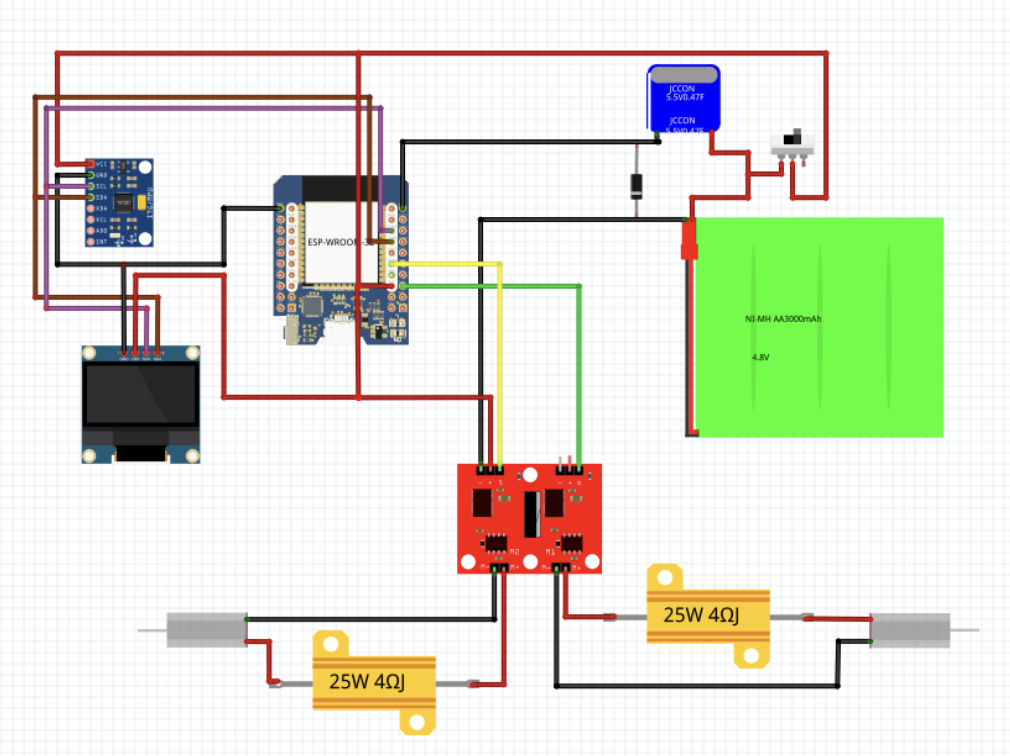
Circuit diagram depicting arrangements of sensors and actuators.
Programming & Control
The control logic implemented real-time position feedback and adaptive motor actuation. The navigation algorithm processed ArUco marker data to calculate distance and orientation relative to targets, adjusting fan speeds accordingly.
- Read live position and orientation from MQTT feed.
- Calculate target direction and distance using trigonometric relations.
- Adjust fan speeds to align with the next waypoint.
- Advance through four preset corner targets to complete a lap.
Results
The final prototype achieved 2.5 laps in 5 minutes, falling just short of the 3-lap benchmark. However, it demonstrated strong reliability and autonomous control, with accurate waypoint tracking and consistent fan actuation. The boat successfully floated, maintained stable navigation, and transmitted live data to the cloud.
- Freeboard Height: ~2 inches with full electronics installed.
- Weight Capacity: 230g payload including battery pack.
- Lap Completion: 2.5 laps / 5 minutes.
- System Reliability: Stable operation across multiple test sessions.